ThunderAuto
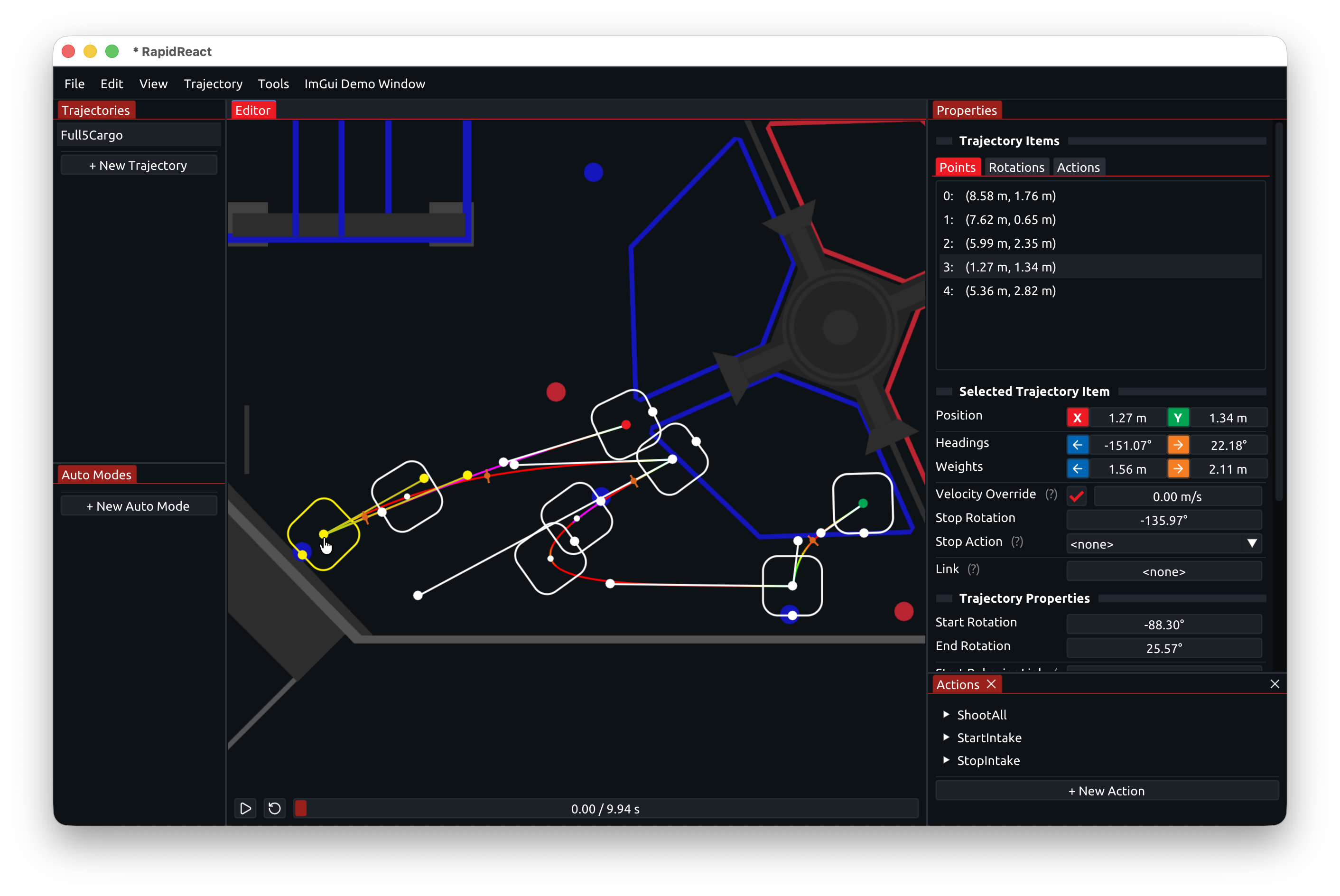
ThunderAuto is a tool developed by FRC Team 1511 to create trajectories for FRC Robots with holonomic (swerve) drivetrains to follow. ThunderAuto trajectories may either be exported to CSV files to be loaded onto the robot, or ThunderLib may be used to read ThunderAuto project files directly on the robot.